728x90
1. 서론
ARM 코딩 공부 중 시리얼 통신 필요해서 구현 중. 시리얼 통신 시 인터럽트 없으면 1글자밖에 못 받는거 인터럽트로 여러 문자 받을 수 있게 구현
2. 본문
- STM32CubeMX 설정
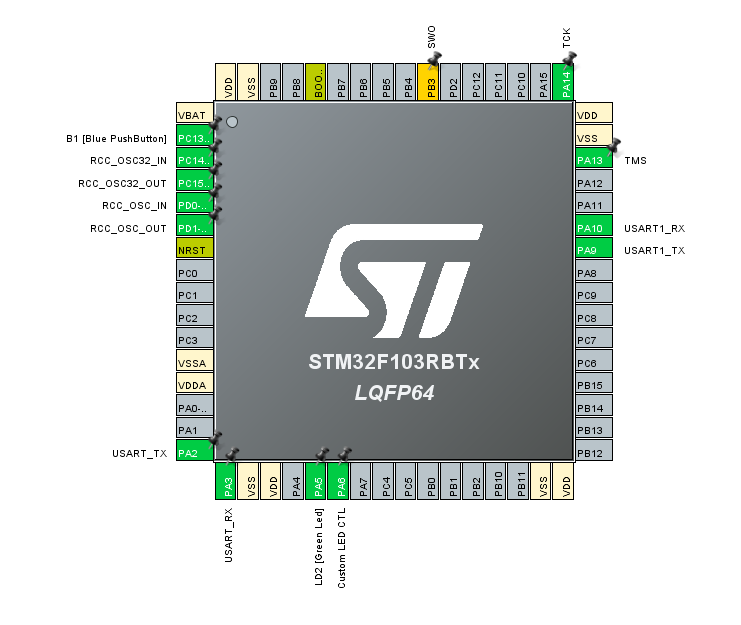


-
ㄲHAL_UART_RxCpltCallback 함수로 시리얼 통신 인터럽트 발생시 아래 로직에 따라 동작
/* USER CODE BEGIN 0 */
int fputc(int ch, FILE *f){
uint8_t temp[1] = {ch};
HAL_UART_Transmit(&huart2, temp, 1, 50);
return (ch);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef * huart){ //** 인터럽트 시 동작 **/
if(huart->Instance == huart2.Instance){
if(Rx_indx==0 ){
for ( int i = 0 ; i < 100 ; i++){ //clear buffer
Rx_Buffer[i] = 0;
}
}
//printf("%c",Rx_data);
Rx_Buffer[Rx_indx++] = Rx_data;
/**
if(Rx_data == 'a'){
Rx_indx = 0;
EndOfTrans= 1;
}
*/
if(Rx_data == '\n'){ // 문자열 바꿈 입력 시
Rx_indx = 0;
EndOfTrans= 1;
}
if(Rx_indx == 100){
Rx_indx = 0;
EndOfTrans= 1;
}
HAL_UART_Receive_IT(&huart2, &Rx_data, 1); // 시리얼통신 인터럽트 한글자 받을 시 동작
}
}
- int main 안에 while로 반복 전 HAL_UART_Receive_IT 함수로 위의 콜백함수가 동작할 수 있도록 설정
/* USER CODE BEGIN 2 */
//이하 생략
printf("hello world! \r\n"); // fputc 함수로 인해서 printf로 결과출력 가능 -> 시리얼로 전달함
HAL_UART_Receive_IT(&huart2, &Rx_data,1); // activate uart rx interrupt everytime receiveing 1 byte
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
if(EndOfTrans == 1){
sprintf(TmpBuffer,"%s",Rx_Buffer);
printf("Data : %s \r\n", TmpBuffer);
EndOfTrans = 0;
HAL_Delay(100);
}
/* 이하 생략 */
}
3. 결론
- 전체 테스트한 코드
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stdio.h"
#include "string.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
char TmpBuffer[102];
int len;
char Rx_indx;
char Rx_data;
char Rx_Buffer[100],EndOfTrans;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
int fputc(int ch, FILE *f){
uint8_t temp[1] = {ch};
HAL_UART_Transmit(&huart2, temp, 1, 50);
return (ch);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef * huart){
if(huart->Instance == huart2.Instance){
if(Rx_indx==0 ){
for ( int i = 0 ; i < 100 ; i++){
Rx_Buffer[i] = 0;
}
}
Rx_Buffer[Rx_indx++] = Rx_data;
if(Rx_data == '\n'){
Rx_indx = 0;
EndOfTrans= 1;
}
if(Rx_indx == 100){
Rx_indx = 0;
EndOfTrans= 1;
}
HAL_UART_Receive_IT(&huart2, &Rx_data, 1);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("hello world! \r\n");
HAL_UART_Receive_IT(&huart2, &Rx_data,1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
if(EndOfTrans == 1){
sprintf(TmpBuffer,"%s",Rx_Buffer);
printf("Data : %s \r\n", TmpBuffer);
EndOfTrans = 0;
HAL_Delay(100);
}
HAL_GPIO_WritePin(GPIOA, LD2_Pin, GPIO_PIN_SET);
HAL_Delay(100) ;
HAL_GPIO_WritePin(GPIOA, LD2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, Custom_LED_CTL_Pin, GPIO_PIN_SET);
HAL_Delay(100) ;
HAL_GPIO_WritePin(GPIOA, LD2_Pin|Custom_LED_CTL_Pin, GPIO_PIN_RESET);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL16;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, LD2_Pin|Custom_LED_CTL_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : B1_Pin */
GPIO_InitStruct.Pin = B1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : LD2_Pin Custom_LED_CTL_Pin */
GPIO_InitStruct.Pin = LD2_Pin|Custom_LED_CTL_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
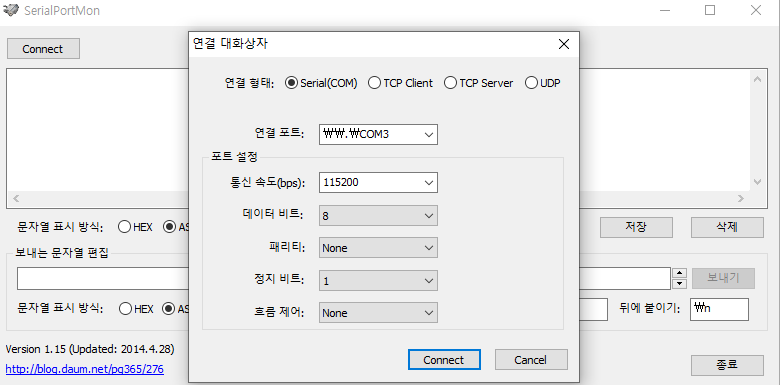
-
결과

4. 맺음말
ARM 펌웨어 개발을 위해 여러가지 공부중에 있습니다. 기타 다양한 의견 주시면 감사하겠습니다.
728x90
'IT > 임베디드' 카테고리의 다른 글
| [임베디드] ESP8266 SSDP, MQTT 구현 (0) | 2021.03.09 |
|---|

댓글